
Nous sommes le 7 mai 2023 ! ... Et c'était le 26 mai 2021 que j'ai écrit la dernière fois sur ce projet (Trains - fin mars 2021). Le temps a passé "trop vite" et bien qu'un autre prototype ait été fait entretemps pour ce moteur, il reste encore du travail. Beaucoup de choses faites depuis évidemment. Des heures de cours Python, du dessin avec Fusion 360 pour divers projets toujours plus prioritaires que le train, bien sûr de la menuiserie et aussi beaucoup de vélo.
Le micro-contrôleur est un QT Py (ATSAMD21) de Adafruit. Sur les photos précédentes, c'était un ItsyBitsy (avec ATSAMD51G) qui a la même largeur et donc rentre dans les rainures. Le QT Py devrait suffire à la tâche d'une aiguille si j'arrive à dialoguer depuis une centrale, soit lire sa position et demander un changement !

Ce prototype est fonctionnel et grâce au nouveau moteur 600tr/mn, la vitesse est correcte. Par contre, la puissance du moteur dû à la réduction m'oblige à modifier la mécanique parce que la tige de commande arrive à repousser le bloc mobile avant d'atteindre le switch (fil vert).
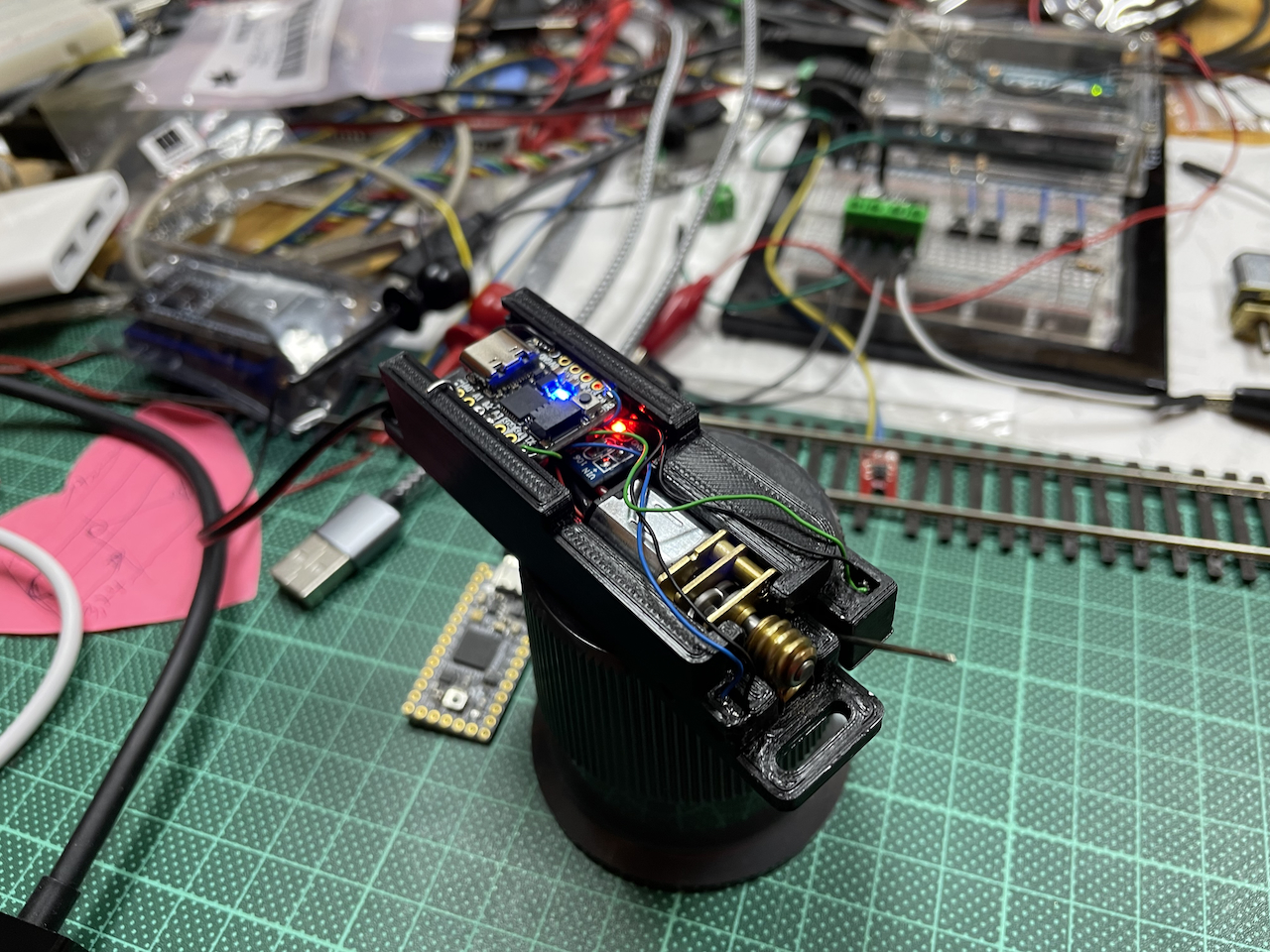
Sur cette photo on aperçoit la led rouge du convertisseur 12v/5v qui alimente le micro-contrôleur et la lumière bleue qui indique un sens de fonctionnement. À l'extrémité gauche, un petit bout de fil sert de commande "touch control" pour inverser la position.
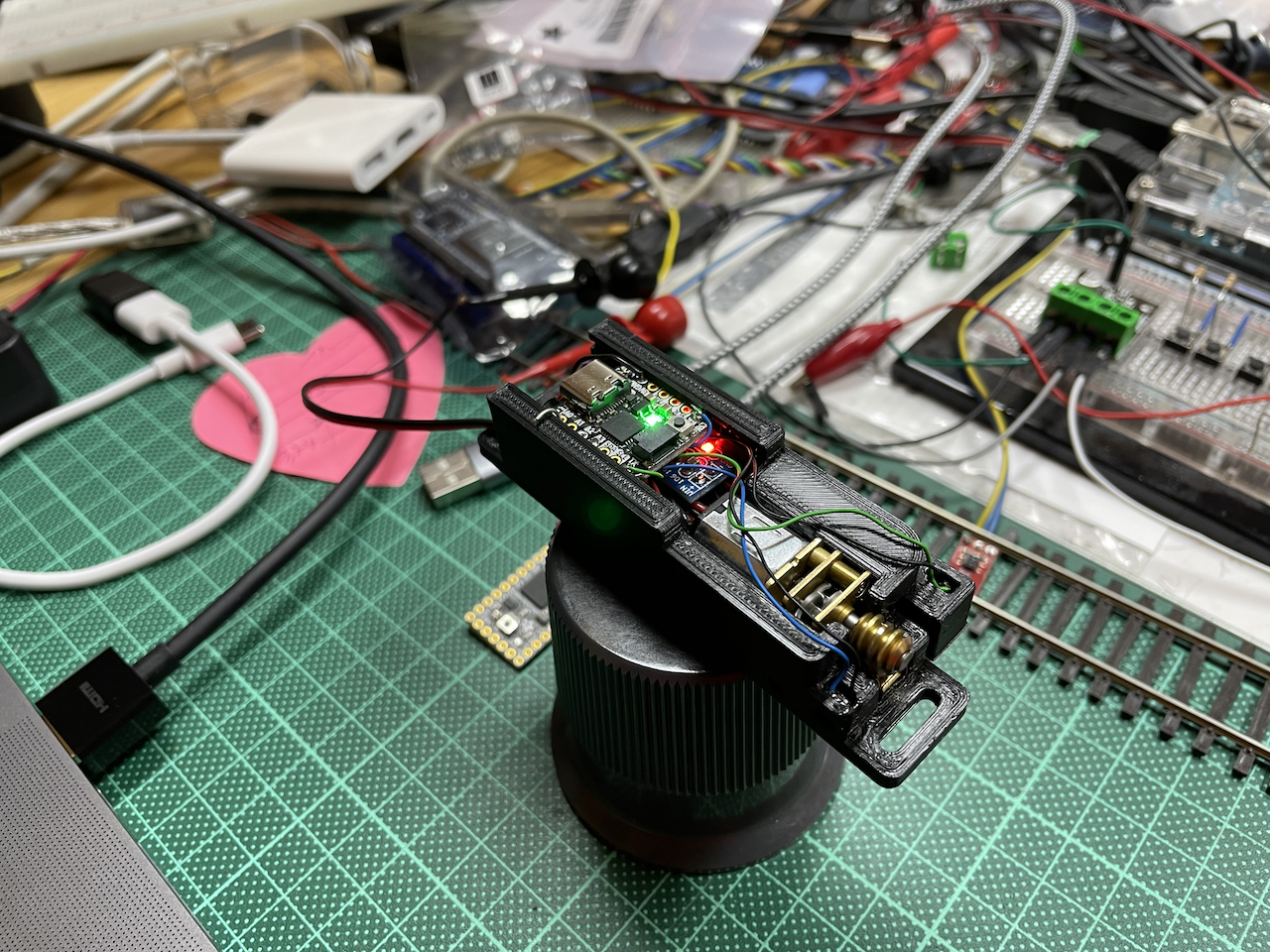
Sur celle-ci la lumière est verte indiquant le fonctionnement dans l'autre sens. Le logiciel est écrit en micro-python (circuit-python exactement) et se charge sur le micro-contrôleur par le connecteur USB-C.
Le nouveau dessin du bloc fixe avec en particulier un agrandissement du palier gauche de l'axe principal et la rainure pour stabiliser le bloc mobile. Les deux "pinces" de chaque côté du bloc sont destinées à maintenir les fils des switchs de fin de course.

Le bloc mobile a donc aussi subi des modifications pour rester parallèle au bloc fixe grâce au bras coulissant.

Ces deux éléments vont à l'impression 3D dans peu de temps !
Comments powered by CComment